【プレスリリース】【プレスリリース】高周波振動により生じるスクイーズ膜を利用した無線浮揚装置の開発
本研究のポイント
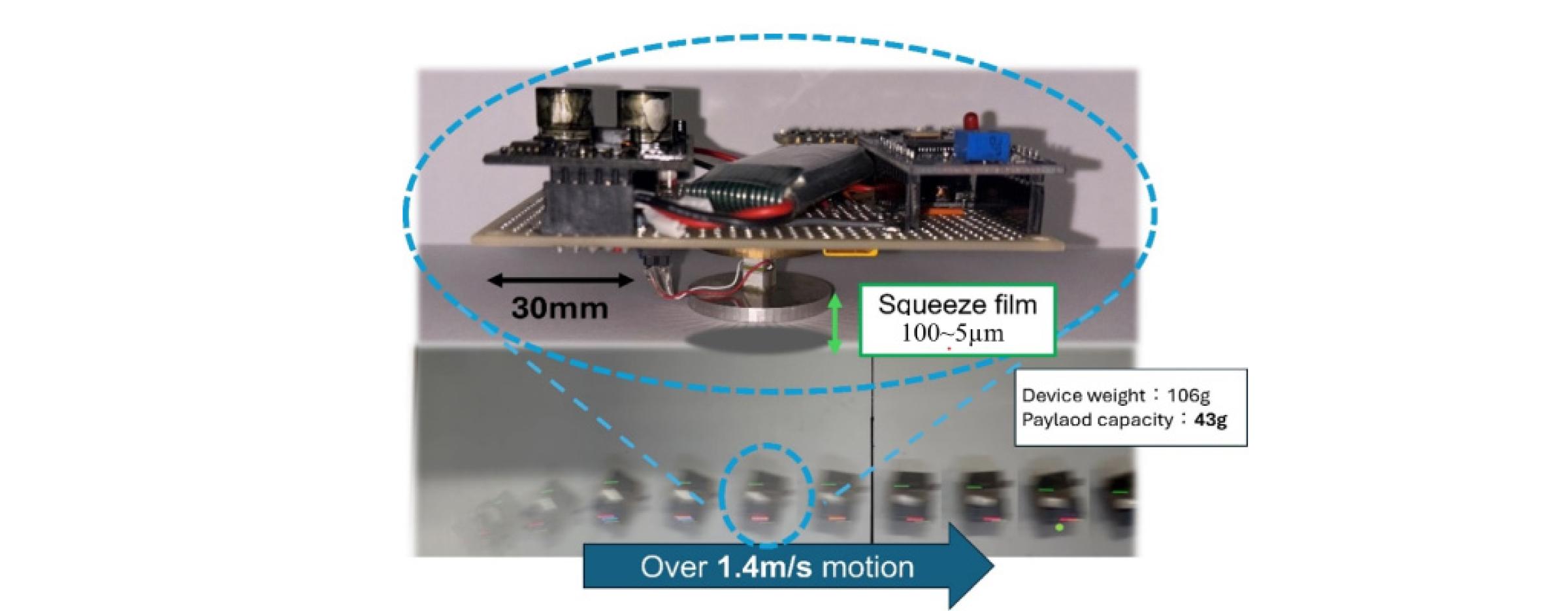
・圧電アクチュエータによってスクイーズ膜を生成する無線浮揚装置を開発
・固体摩擦を低減、無線接続とすることで、安定した浮揚高さと高速かつ柔軟な搬送の実現
・水平速度1.4 m/s、傾斜面上で3.0 m/s、回転速度90 rpmの摩擦レス移動を実現
・直線運動と回転運動の組み合わせにより平坦面上をフレキシブル・高速で滑走
・自重の0.4倍までの荷重を搬送可能
・化学試料の搬送やバイオメディカル用途での遠心処理などの応用に期待
研究概要
横浜国立大学の渕脇大海准教授らの研究グループは、積層型圧電アクチュエータを用いた無線浮揚装置の開発に成功しました。また、無線駆動回路を開発し、配線を排除することにより従来の浮揚システムと比べて高い速度と安定した浮揚高さを、事務机等の身近にある平坦面上で達成しました。今回の成果により、摩擦レスを活かした電子部品、機械部品、化学材料、生体材料などの全方向高速搬送や、高速スピンによる試験管の回転・混合などにおいて、今後の応用が期待されます。
社会的な背景
電子製品の小型化に伴い、電子部品や機械部品、生体細胞、化学物質、試験管などの小型部品を迅速に搬送する技術の需要が高まっている。しかし、搬送ロボットの多くは、ロボットと床面との間に生じる固体摩擦の影響により、高速化が困難である。この課題を克服してより迅速に搬送できるロボットの開発が期待されていた。
研究成果
本研究では、圧電アクチュエータによってスクイーズ膜を生成する無線浮揚装置(ULS)の開発に成功した。一般的に使用されるホワイトボードや机など、様々な平坦面上で摩擦のない移動を維持でき、水平速度1.4 m/sおよび傾斜面上で3.0 m/sの摩擦レスな滑走を実現した。さらに、90 rpmの回転速度を達成し、回転運動と直線運動の組み合わせにより姿勢の柔軟な調整を伴う高速搬送が期待できる。
今後の展開
今後は、浮揚効率の向上や電力供給の最適化、凹凸のある面や動的荷重下での浮揚高さの安定性確保による可搬能力の向上が重要となる。また、複数の浮揚装置を統合し、推進機構を備えたロボットの開発を計画している。接触レスかつ高速なハンドリングを活かして、化学試料の搬送やバイオメディカル用途での遠心処理などにおいて、今後の応用が期待される。
謝辞
本研究の成果の一部は、2024年度高橋産業経済研究財団、NSKメカトロニクス技術高度化財団、中西奨学会の助成を受けました。研究室一同謝意を表します。
用語解説
[用語1]
積層型圧電アクチュエータ:複数の薄い圧電素子を積み重ねた構造で、電圧をかけるとわずかに伸縮し、逆に力を加えると電圧を発生する電子部品。
[用語2]
スクイーズ膜:高周波振動することにより発生する、二物体の間に生じる空気膜。
[用語3]
遠心処理:試験管などの容器を高速回転させることで、遠心力を利用して液体を混合・分離する技術。
論文情報
| 掲載誌 | Advanced Intelligent Systems |
|---|---|
| タイトル | Ultrafast untethered levitation device utilized squeeze film for omni-directional transport |
| 著者 | Yuta Sunohara, Soushi Ueno, Rintaro Minegishi, Chihiro Sekine, Yuta Kitamura, Yuna Sugiyama, Satoshi Ando, Akihiro Torii, Ohmi Fuchiwaki |
| DOI | http://doi.org/10.1002/aisy.202401098 |
資料
研究者プロフィール
渕脇大海![]()
大学院工学研究院 准教授
お問い合わせ先
<研究に関すること>
大学院工学研究院 准教授 渕脇大海
メールアドレス: fuchiwaki-ohmi-xk ynu.ac.jp
ynu.ac.jp
<報道に関すること>
横浜国立大学 総務企画部 リレーション推進課
メールアドレス: press ynu.ac.jp
(担当:リレーション推進課)



