【プレスリリース】手のひらサイズでサブマイクロメートル精度の精密経路追従を実現
本研究のポイント
課題: 従来の精密位置決め装置は大型で、動作範囲が狭いという課題があった。
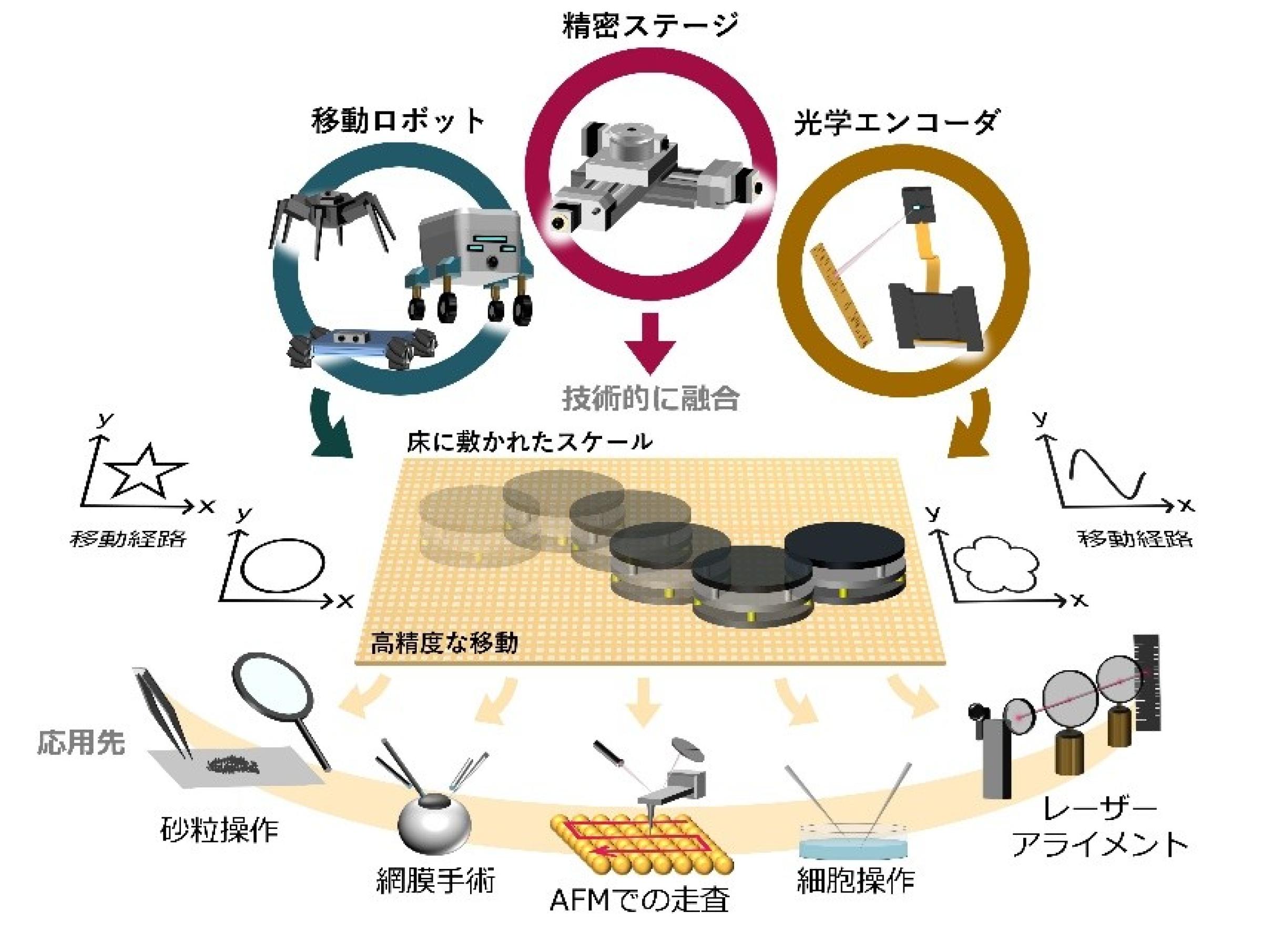
成果: 圧電素子を用いた手のひらサイズのXYθの独立三自由度を有するホロノミック移動ロボット「Holonomic-Beetle」の広範囲での精密経路追従に成功。
実証: サブマイクロメートル(0.01µm分解能)の制御で、1cm²~100µm²の範囲において誤差0.5µm~4.75µmの経路追従に成功。
展望: 微細加工、生物医療、光学、精密部品製造、半導体分野など、精密さと広範囲移動を両立する新たなプラットフォームとしての応用に期待。
研究概要
横浜国立大学の渕脇大海准教授らの研究グループは、従来の精密位置決め装置が抱える「装置の大型化」と「動作範囲の狭さ」という課題を解決するため、圧電素子を用いた手のひらサイズのホロノミック精密自走ロボット「Holonomic-Beetle」の精密経路追従を実現しました。 本ロボットは0.01µm(マイクロメートル)という極めて高い分解能を有しており、PID制御を用いることで、1cm²~100µm²の位置決め範囲において、経路誤差を0.5µm~4.75µmに抑えた精密な経路追従を実現しました。これにより、従来は困難であった「小型サイズ」と「広範囲の精密位置決め」の両立を実証し、将来的な微細加工や医療分野への応用可能性を示しました。
本研究成果は国際科学誌「Advanced Intelligent Systems」(2026年1月30日付) に掲載されました。
社会的な背景
精密工学の分野において、高精度な位置決めを行う装置は、動かそうとする対象物に比べて装置自体が非常に大型になってしまうという課題がありました。また、精度を高めれば高めるほど、高剛性化するために装置が動作できる範囲(可動域)が狭くなるというトレードオフも存在します。 そこで本研究チームは、これらの課題を解決するため、コンパクトでありながらXYθの独立三自由度を持ち、事務机、実験テーブル、顕微鏡ステージ等の平坦面であれば無制限の移動範囲を持つ、積層型圧電素子[用語2]を用いた小型移動ロボットの開発に取り組みました。
研究成果
本研究では、PID制御を用いてXYθの独立三自由度を持つホロノミック精密自走ロボット「Holonomic-Beetle」のマルチレンジでのXYθ軸の精密経路追従を実現しました。このロボットは手のひらサイズのコンパクトな設計でありながら、積層型圧電素子を駆動源とすることで、0.01µm(マイクロメートル)という極めて高い分解能を有しています。
研究チームは、1cm²、1mm²、100µm²という異なるスケールの平面上で、ロボットによる精密な経路追従実験を行いました。その結果、直線経路、エピサイクロイド(花型)経路において経路誤差(目標経路からの誤差)をそれぞれ0.5µm、4.75µm の範囲内に抑えて移動することに成功しました。 この結果は、本ロボットが動作平面上の位置姿勢の精密位置決めと、広範囲搬送の両方に適していることを実証するものです。
今後の展開
次のステップとして、現在の実証範囲をメートル級の作業領域へと拡大し、より実用的な環境での運用を目指します。具体的には、計測範囲の拡大、ステップ幅・駆動周波数の向上による高速化、機械的剛性の強化、さらにツール搭載時の振動などを抑制するためのモデルベース制御の導入を予定しています。
最終目標は、Holonomic-Beetleを単なる移動ロボットではなく、あらゆる場所を『精密な作業台』に変えるツールとして応用することです。自由に動き回る足と、顕微鏡レベルの細かさで止まる技術を融合させることで、これまでの大型装置では不可能だった場所での精密作業を実現します。
グリッパー、プローブ、インジェクタなどの様々な作業ツールを搭載し、複数のロボットを連携させることで、低コストかつ片手で再配置可能な拡張性のある精密作業プラットフォームの構築を目指します。これにより、研究室や試作開発での微細加工や医療手術、光学部品の組み立てなど、新たなアプリケーションへの応用が期待されます。
謝辞
本研究の一部は、次の助成を受けて実施されました。研究室一同謝意を表します。中西奨学会、NSKメカトロニクス技術高度化財団(14019)、高橋産業経済研究財団 (14-002-019)、津川財団、三菱財団 自然科学研究助成 (202510045)
用語解説
[用語1(図中)]エンコーダ
モーターの回転数やステージの移動量を検出し、デジタル信号として出力するセンサ。
[用語2]積層型圧電素子
複数の薄い圧電素子を積み重ねた構造で、電圧をかけるとわずかに伸縮し、逆に力を加えると電圧を発生する電子部品。
論文情報
| 掲載誌 | Advanced Intelligent Systems |
|---|---|
| タイトル | Sub-Micrometer-Precision Path Following of Piezo-Actuated Mobile Robot |
| 著者 | Eiji Kusui, Chihiro Sekine, Taiki Goto, Ryosuke Kinoshita, Yuko Nishimura, Shogen Sekiguchi, Satoshi Ando, Yuto Oishi, Yusuke Matsui, Ohmi Fuchiwaki |
| DOI | 10.1002/aisy.202501141 |
資料
研究者プロフィール
渕脇 大海![]()
大学院工学研究院 准教授
お問い合わせ先
<研究に関すること>
大学院工学研究院 准教授 渕脇大海
メールアドレス: fuchiwaki-ohmi-xk ynu.ac.jp
ynu.ac.jp
<報道に関すること>
総務企画部 リレーション推進課
メールアドレス: press ynu.ac.jp
(担当:リレーション推進課)



